Представлена открытая платформа Open Micro Manipulator — низкозатратный 3-осевой микроманипулятор с субмикронной точностью. Этот проект, разработанный энтузиастом под ником 0x23, использует 3D-печать, шаговые двигатели и закрытую петлю управления для шагов до 50 нм в объеме около 23×23×23 мм³. Устройство поддерживает G-Code для интеграции с принтерными хостами или Python-скриптами, что делает его подходящим для автоматизированной микроскопии, оптической юстировки или тестов электроники.
Технические достижения.
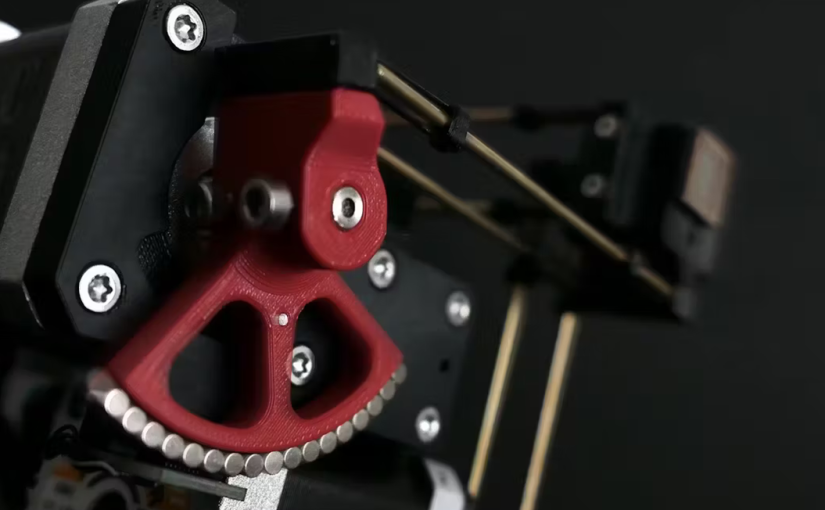
Платформа применяет параллельную кинематику с миниатюрными шарнирами для жесткости и диапазона движения. Шаговые моторы (например, NEMA-17) работают в закрытой петле с ШИМ-сигналами 30 кГц. «Магнитная передача» усиливает разрешение дешевых энкодеров в 30 раз, достигая 50 нм на шаг. Это впечатляет для бюджетного решения без piezo-актуаторов. G-Code обеспечивает траектории с lookahead-планированием, а Python API упрощает интеграцию.
Преимущества.
- Доступность → Компоненты недорогие, сборка не требует SMD-пайки, BOM и STL-файлы открыты на GitHub.
- Гибкость → Подходит для хобби и лабораторий с ограниченным бюджетом.
- Открытость → Сообщество в Discord позволяет дорабатывать проект.
Критика и ограничения.
Разрешение в 50 нм — это минимальный шаг, но абсолютная точность значительно ниже из-за люфтов, вибраций и ошибок энкодеров (радиальная ошибка вала не охарактеризована). В реальных задачах, как литография, требуется повторяемость на уровне единиц нанометров, чего здесь нет без дополнительной калибровки.
3D-печатные детали вызывают термический дрифт; разработчик рекомендует углеродные филаменты, но это не решает проблему полностью. Рабочий объем 23 мм³ ограничивает применение макро-задачами, а параллельная кинематика усложняет масштабирование.
Сборка требует ручной калибровки осей и хранения в flash, что отпугивает новичков. PCB версии 1.2 имеет дефект (смещенная via), нуждающийся в ремонте. Проект зависит от сообщества, без коммерческой поддержки.
Шаговые моторы с микрошагами теряют крутящий момент на мелких шагах, вызывая пропуски или осцилляции без тщательной настройки. Для сравнения, коммерческие пьезо-платформы обеспечивают настоящую нанометрическую точность, но за тысячи долларов.
Заключение.
Open Micro Manipulator вдохновляет как proof-of-concept для демократизации прецизионной механики, но остается прототипом с компромиссами в точности, стабильности и удобстве. Для серьезных применений рекомендую гибридные доработки или переход к проверенным системам вроде OpenFlexure. Проект ценен для образования и хобби, но требует реалистичных ожиданий от «50 нм» — это разрешение, а не надежная метрология.